
Graduate Research Assistant at the Beijing Institute of Technology
I research bio-robotics, autonomous navigation, sensor fusion, and neuromorphic methods. My work focuses on developing robust navigation frameworks for GPS-denied environments through sensor fusion, neuromorphic approaches, and advanced simulation.
To learn more about my projects please visit my personal website.
Email: chandan [at] bit [dot] edu [dot] cn
Location: Beijing, China
News / Experience
-
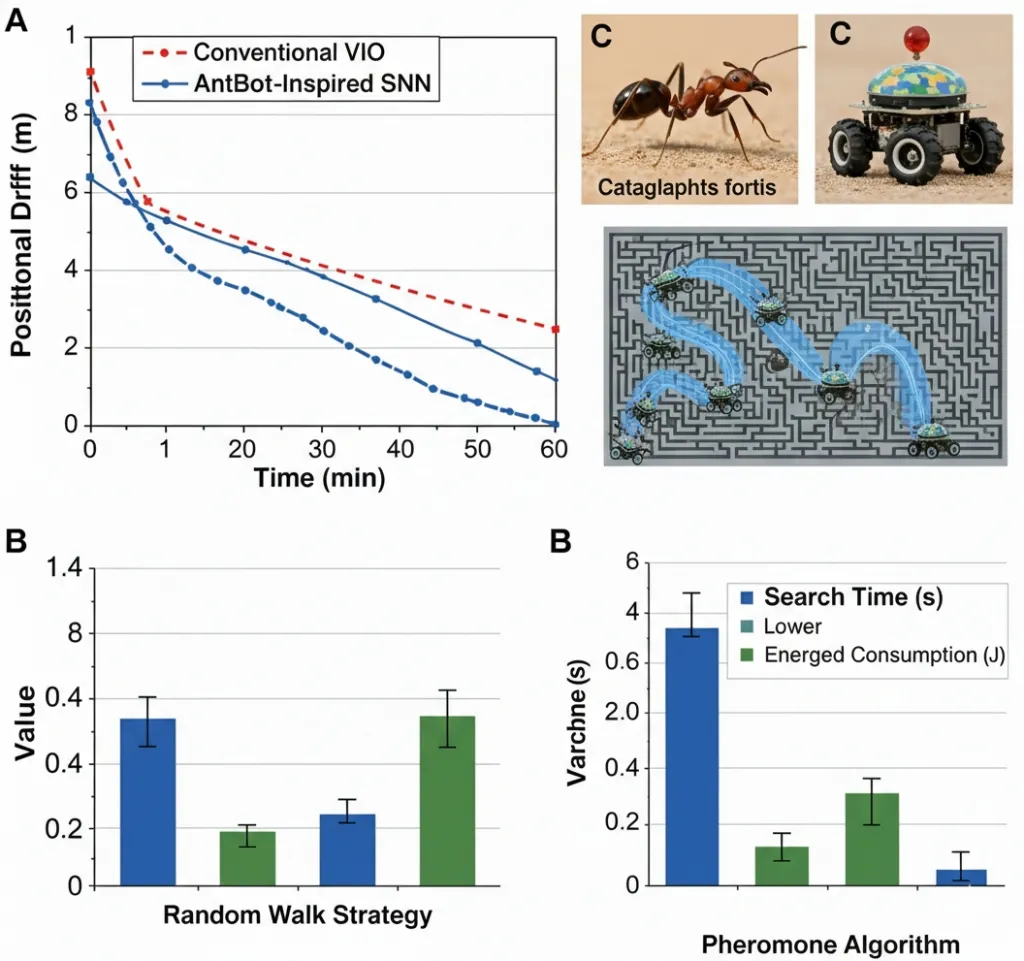
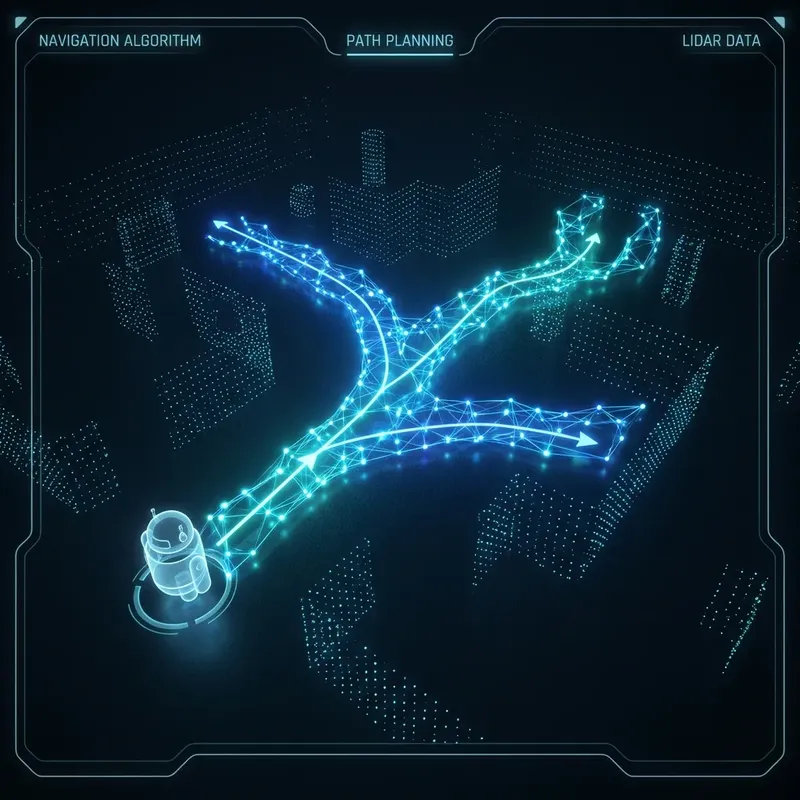
Nov 2025 Nature-inspired navigation system helps robots traverse complex environments without GPS. Our recent work on AntBot-inspired Spiking Neural Networks (SNN) and pheromone algorithms is featured in TechXplore.
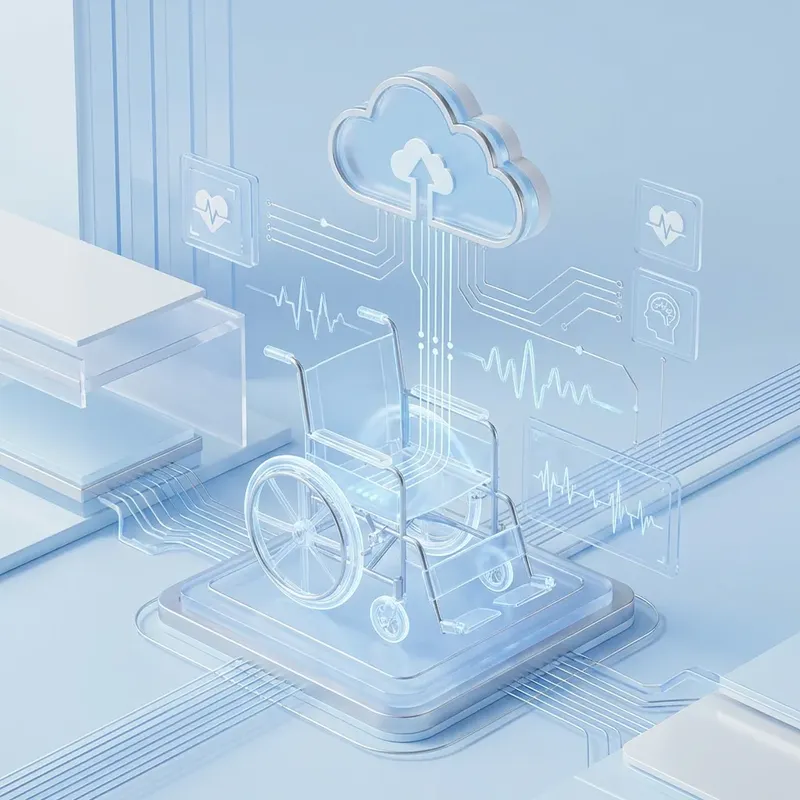
- Dec 2024 Architecting a smart wheelchair walker with a cloud platform for real-time monitoring and remote assistance.
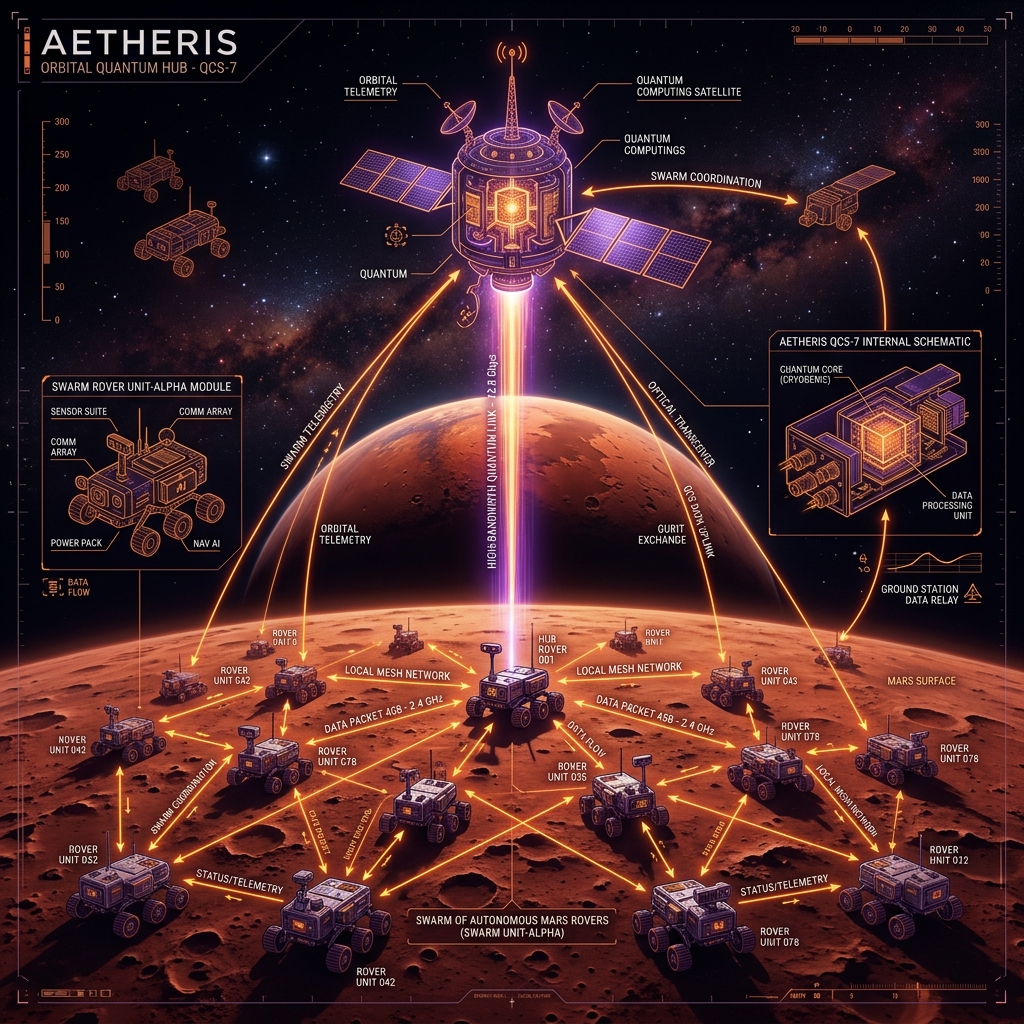
- Sep 2024 Started Graduate Research Assistantship at BIT; working on bio-inspired swarm robotics and GPS-denied navigation.
Publications
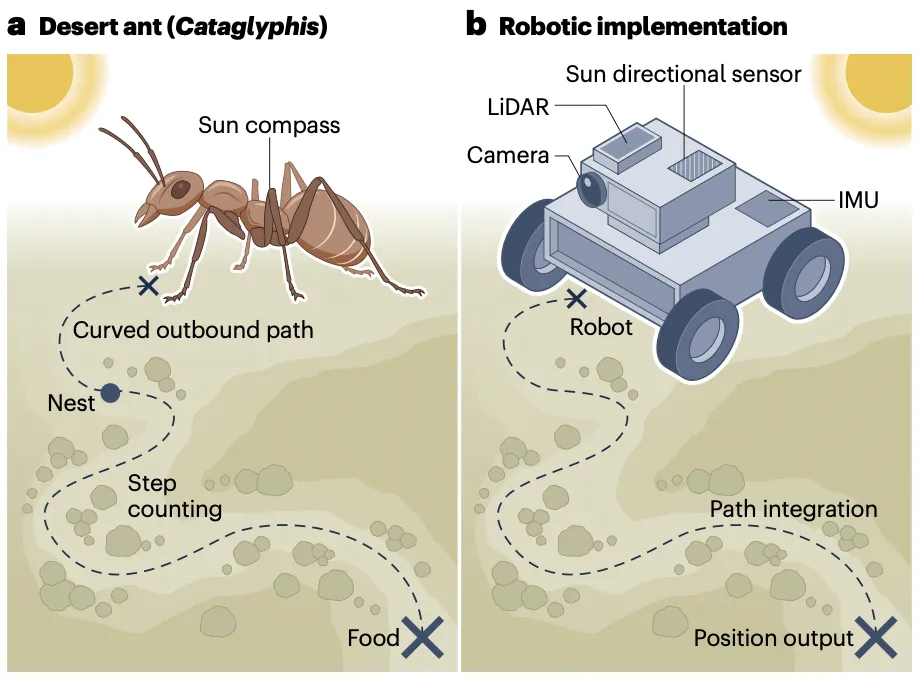
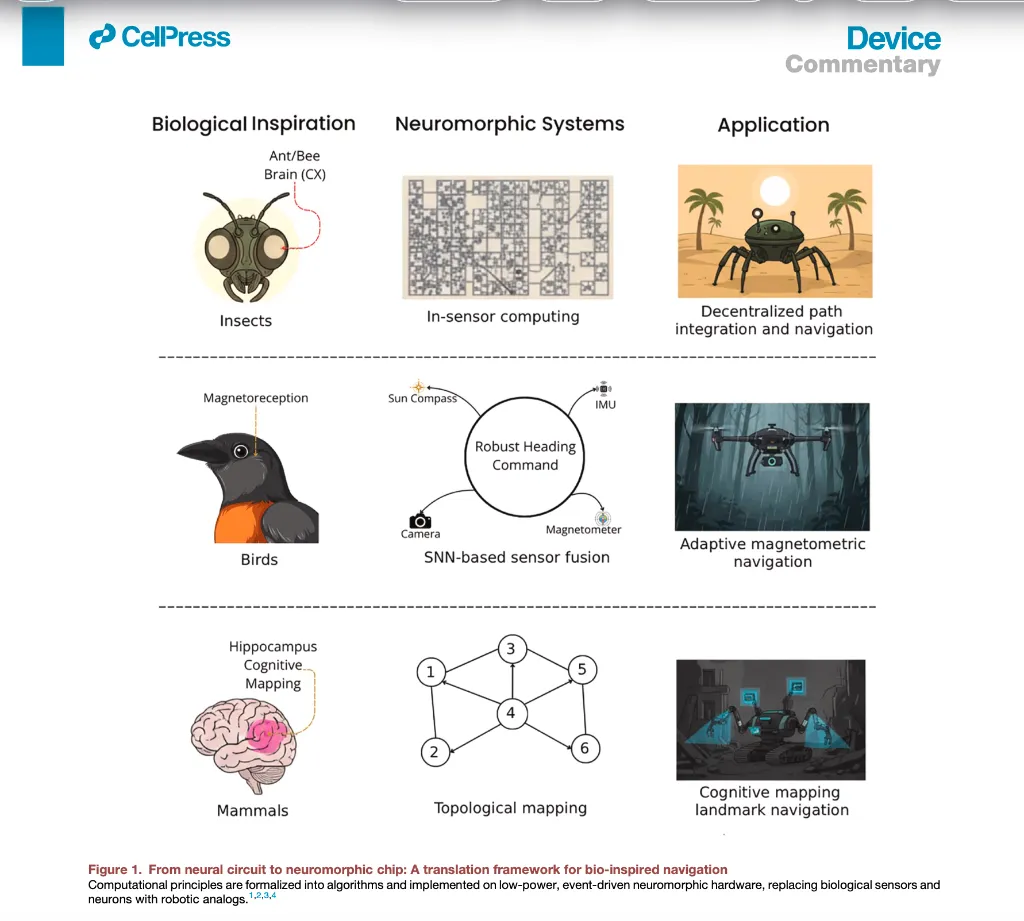
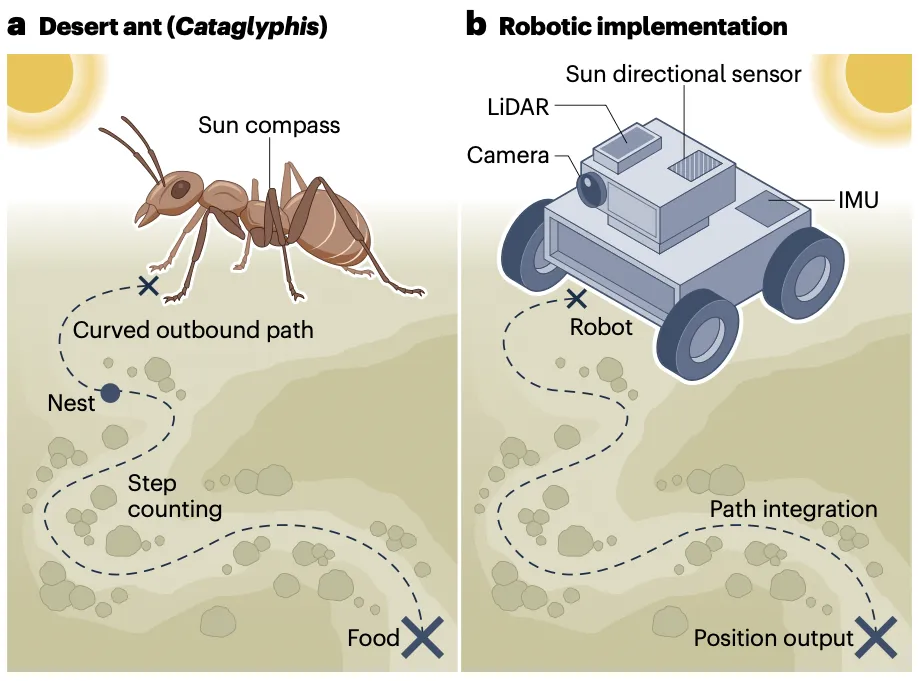
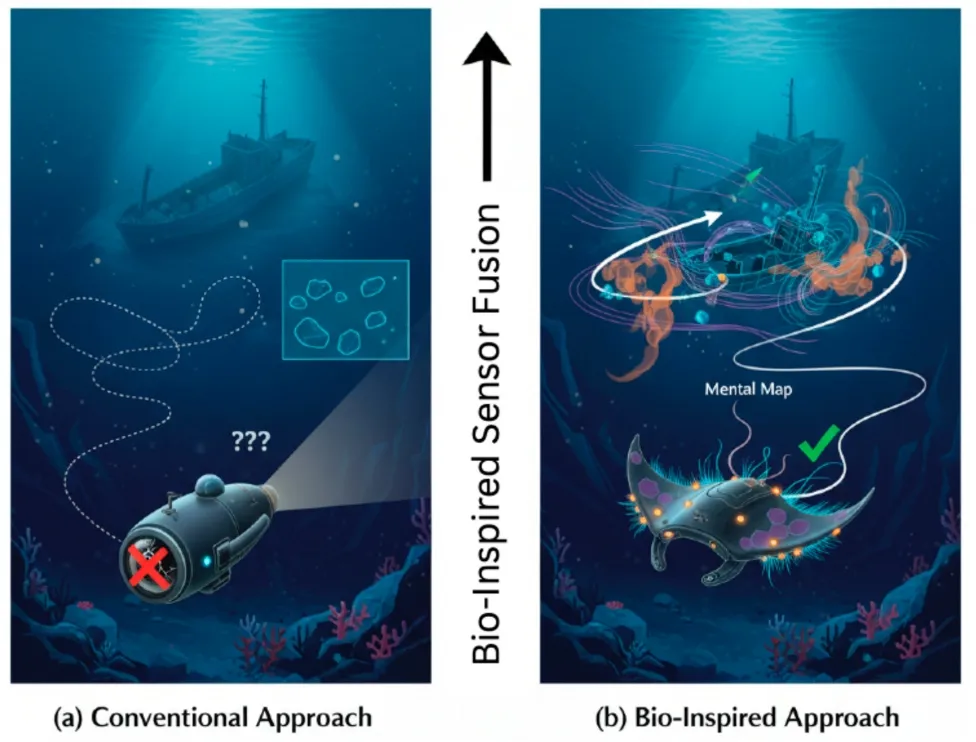
 Bio-inspired navigation systems for robots
Bio-inspired navigation systems for robots
C. Sheikder*, W. Zhang, X. Chen, F. Li, X. He, Z. Zuo, X. Tan, Y. Liu
Nature Reviews Bioengineering (2025)
Paper
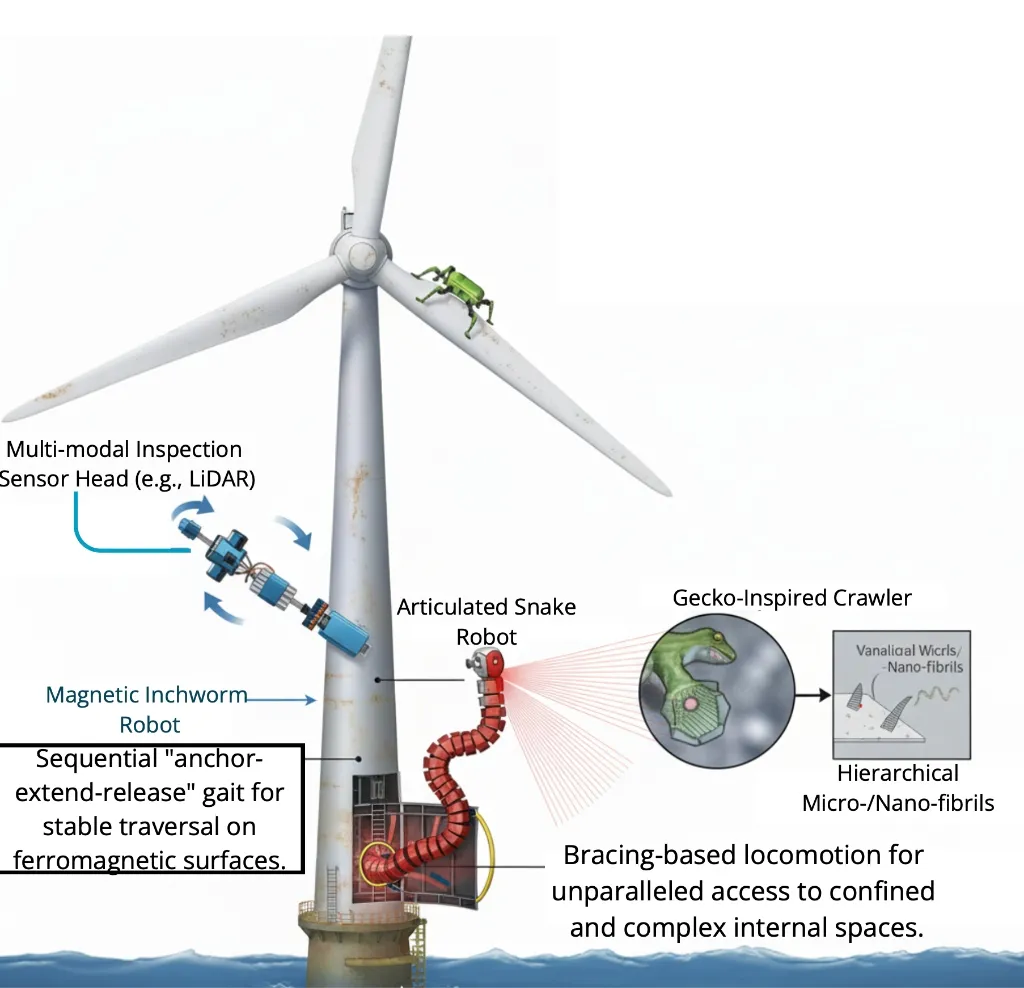
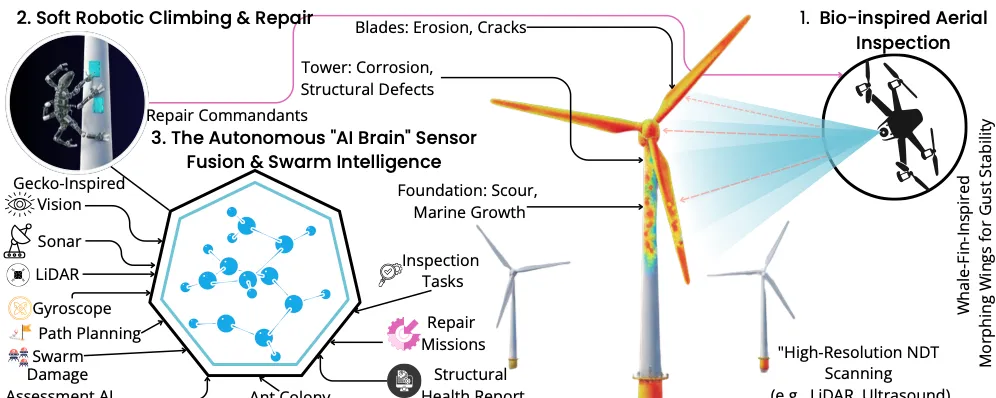
C. Sheikder*, W. Zhang, X. Chen, F. Li, Z. Zuo, Y. Liu, X. He, X. Tan, S. Fan
Renewable and Sustainable Energy Reviews
Paper
C. Sheikder*, W. Zhang, X. Chen, F. Li, X. He, Z. Zuo, X. Tan, Y. Liu
Autonomous Artificial Intelligence (2026)
Paper
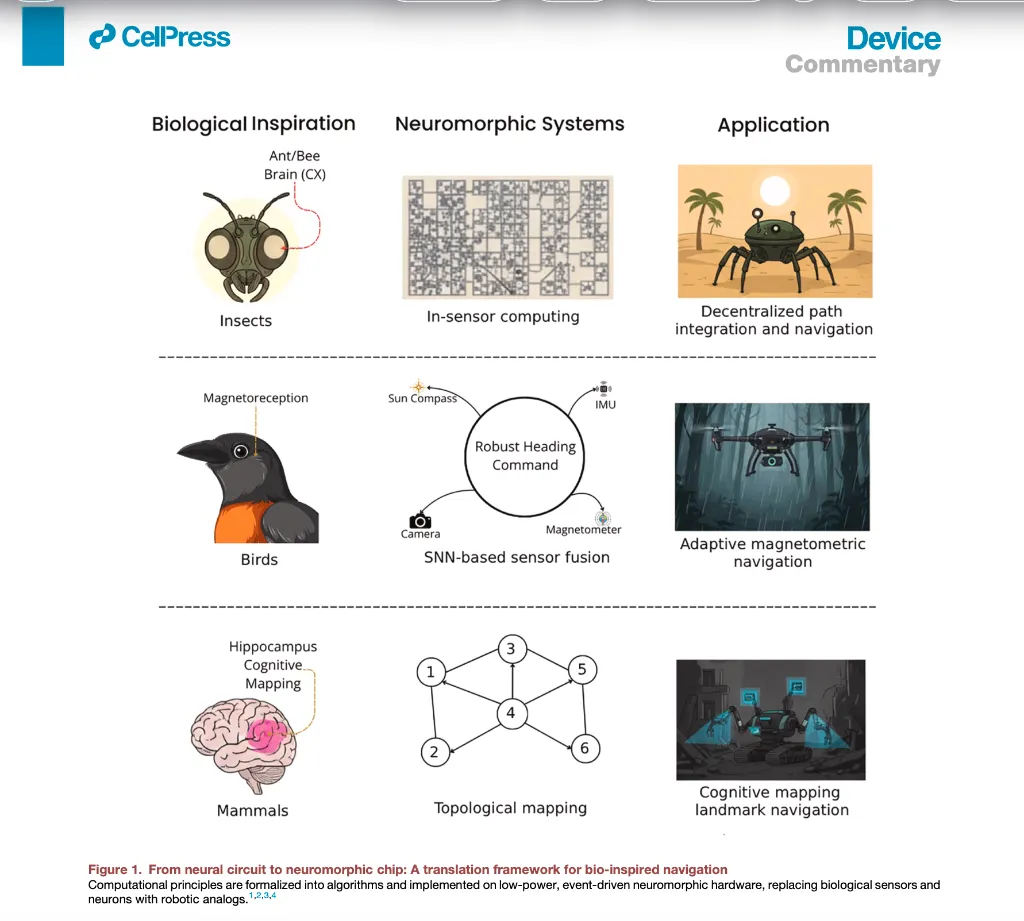
C. Sheikder*, W. Zhang, X. Chen, C. Marco, S. Fan
Device (2025)
Paper
S. Fan, X. Chen, W. Zhang, P. Xu, Z. Zuo, X. Tan, X. He, C. Sheikder*, M. Guo, et al.
Sensors (2025)
Paper
C. Sheikder*, W. Zhang, X. Chen, F. Li, Y. Liu, Z. Zuo, X. He, X. Tan
Sensors (2025)
Paper
C. Sheikder*, W. Zhang, X. Chen, F. Li, X. He, H. He, S. Fan, X. Tan
Sensors (2026)
Paper | Code
 Soft Computing Techniques Applied to Adaptive Hybrid Navigation Methods for Tethered Robots in Dynamic Environments
Soft Computing Techniques Applied to Adaptive Hybrid Navigation Methods for Tethered Robots in Dynamic Environments
C. Sheikder*, W. Zhang, X. Chen, F. Li, Y. Liu, X. He, Z. Zuo, X. Tan
Journal of Field Robotics
Paper | Code
M. M. Haque, C. Sheikder*, Q. Hu
2022 IEEE Conference on Interdisciplinary Approaches in Technology and Management for Social Innovation (IATMSI)
Paper
C. Sheikder*, M. M. Haque
Journal of Aviation/Aerospace Education & Research (2025)
Paper
Z. Zuo, N. Pei, W. Zhang, F. Li, X. Tan, X. He, S. Fan, C. Sheikder*, M. Mabrouk
Nondestructive Testing and Evaluation (2026)
Paper
C. Sheikder*, W. Zhang, X. Chen, S. Fan, T. Li, H. He
Astronautics (2026)
Paper | Code

M. M. Haque, C. Sheikder*, R. Djembong, M. T. W. Piash
European Journal of Electrical Engineering and Computer Science (2023)
Paper
Projects
Peer Review and Editor
Guest Editor
Sensors, MDPI